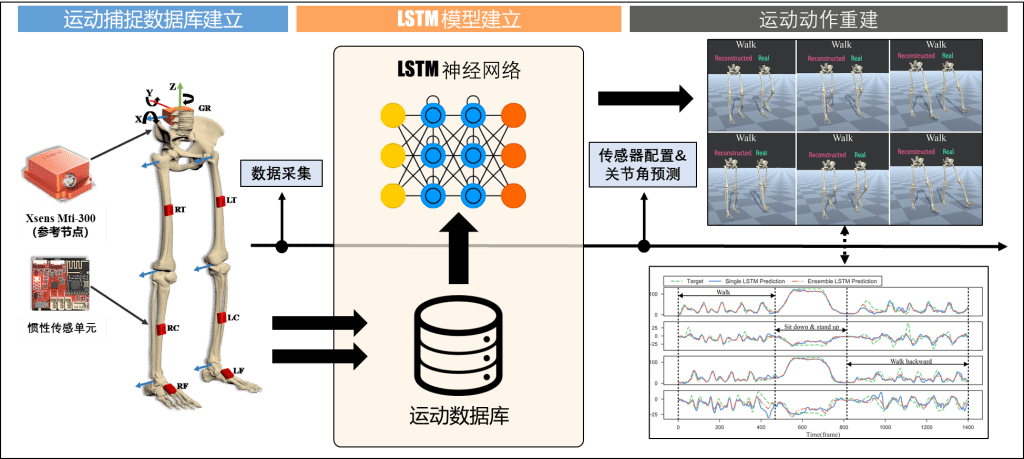
05-人体上肢、下肢可穿戴无线惯性运动捕捉系统 项目支撑:国家自然科学基金青年基金研究支持:中国科学院自动化研究所 基于惯性传感器的人体运动捕捉系统通常需要在每组活动肢体上放置传感器节点,这显著增加了运动捕捉设备的部署成本。在本研究中,我们认为像人体这样的多连杆复杂系统的运动是冗余的。因此,基于全套自主开发的人体惯性运动捕捉系统,我们探讨了使用稀疏节点进行三维运动重建的可能性。