项目支撑:国家重点研发计划智能机器人专项-脑卒中康复机器人
研究支持:中国科学院合肥物质科学研究院、东南大学、南京医科大学
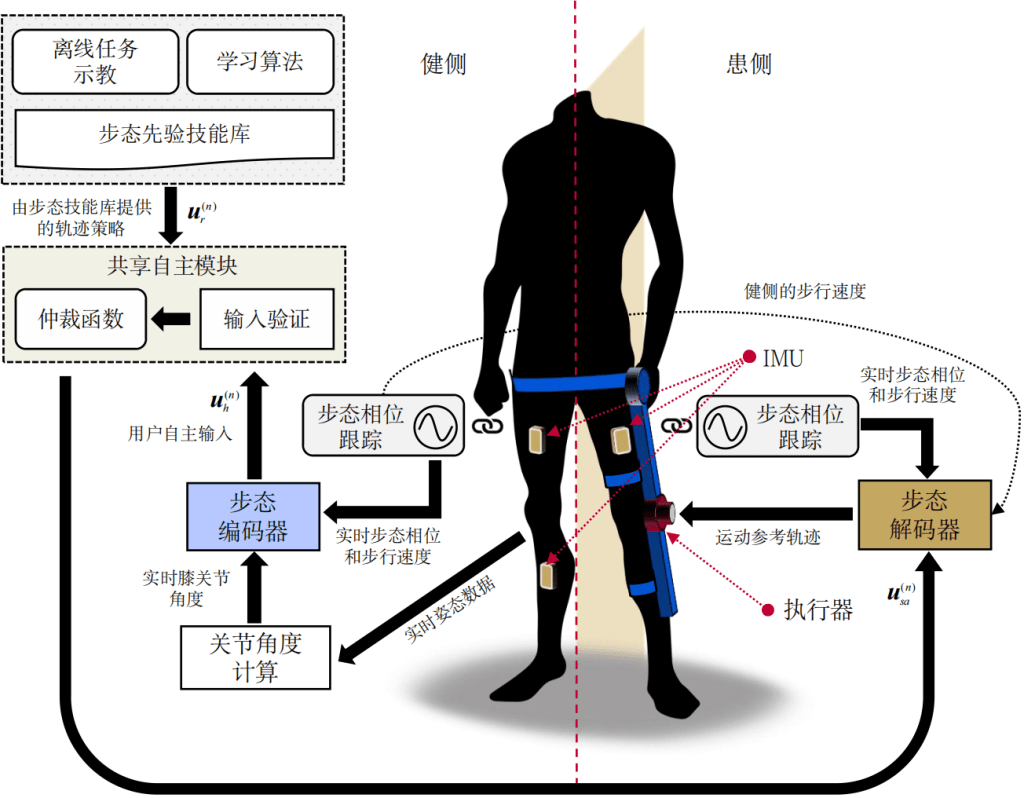
对于脑卒中导致的偏瘫步态障碍,机器人步态训练因其有效性备受患者与临床医生认。本研究基于自主开发的一套主动式膝关节矫形器原型样机,提出了一种针对偏瘫患者的自适应对称步态轨迹生成框架。该框架采用自适应非线性频率振荡器和节律动态运动基元,实现了实时在线步态编码与自适应相位延迟。此外,结合步态技能库,我们设计了在线输入验证与仲裁功能的共享自主框架,以确保轨迹规划的安全性,避免健侧膝关节的不确定性运动带来风险。
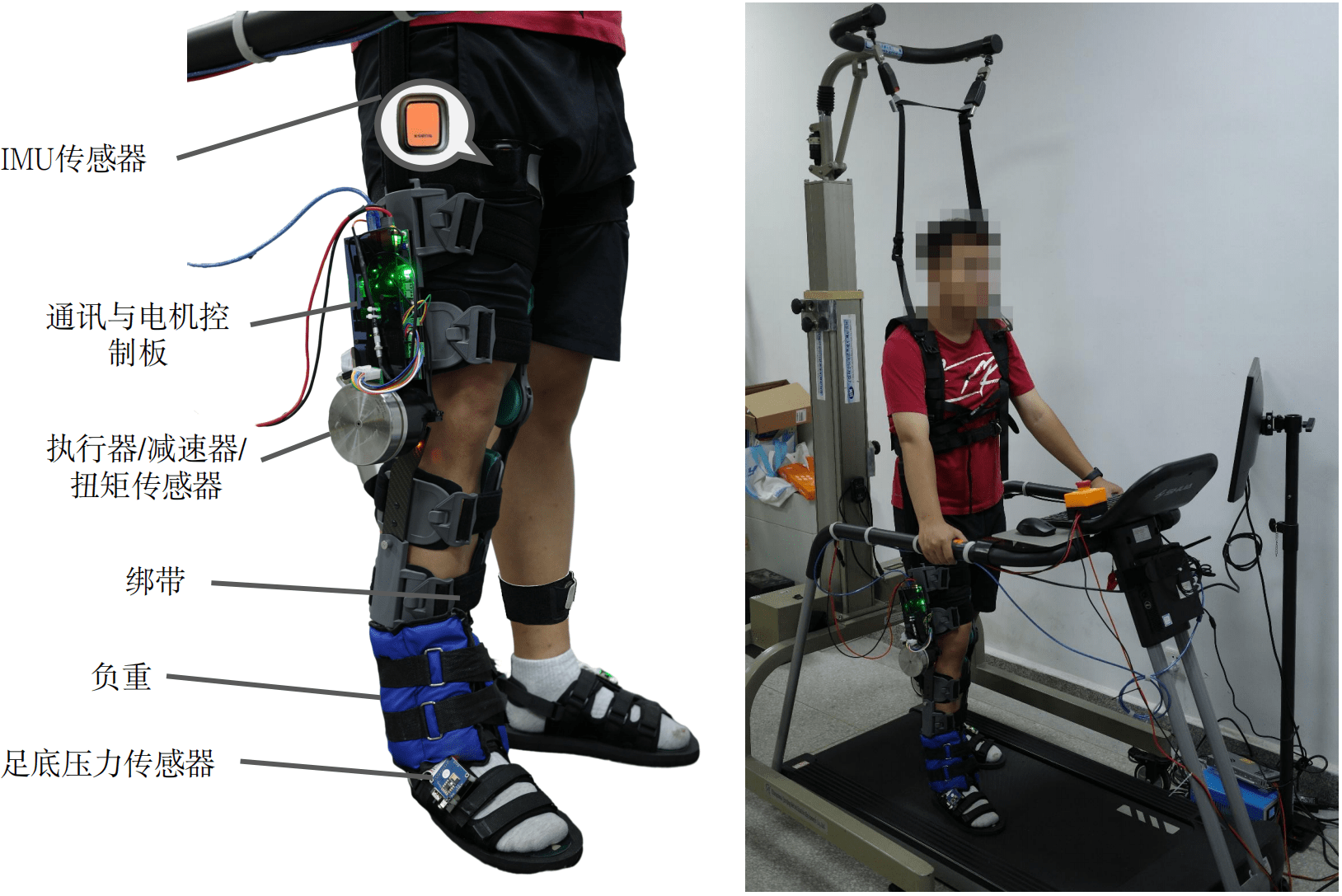
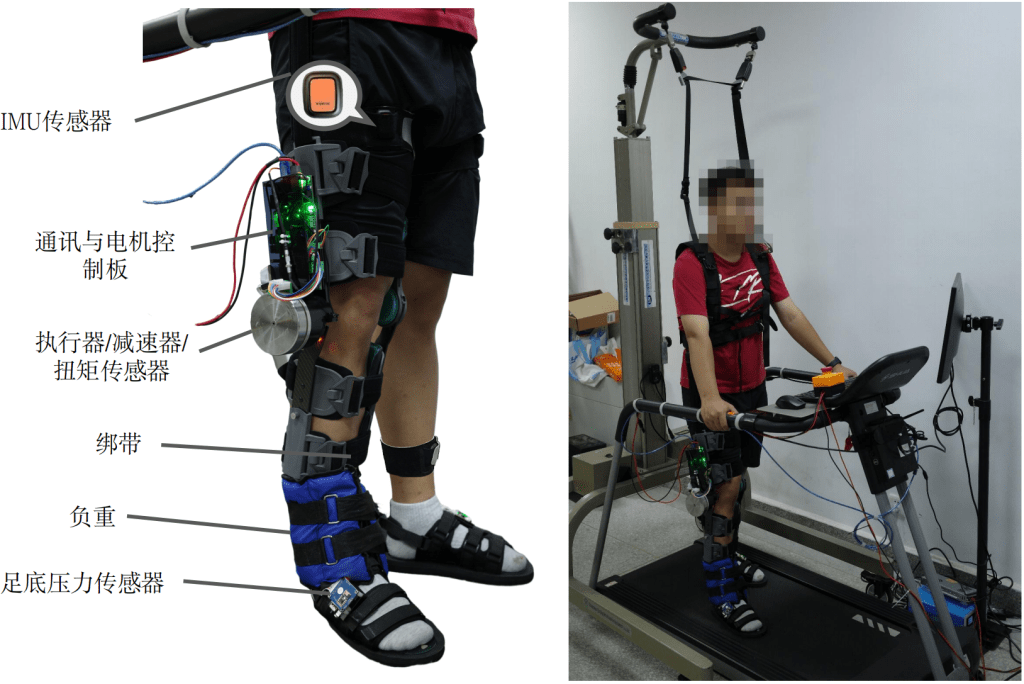
主动式膝关节矫形器原型
技术细节
- 重量: 3.1kg
- 电机:Maxon Flat 50 直流无刷电机
- 驱动:Maxon ESCON 50/5
- 传感器1: Xsens DOT惯性传感器网络,捕捉关节运动学信息,蓝牙通讯
- 传感器2: 电阻式GRF足底压力传感器模组,捕捉步态事件,蓝牙通讯
- 传感器3: 静态扭矩传感器,捕捉电机减速后输出端交互力,RS485通讯
- 传感器4: 磁环编码器,捕捉电机减速后输出端位置,RS485通讯
- 矫形器材质:碳纤维
- 步态轨迹处理:动态运动基元,自适应耦合CPG
数据传输
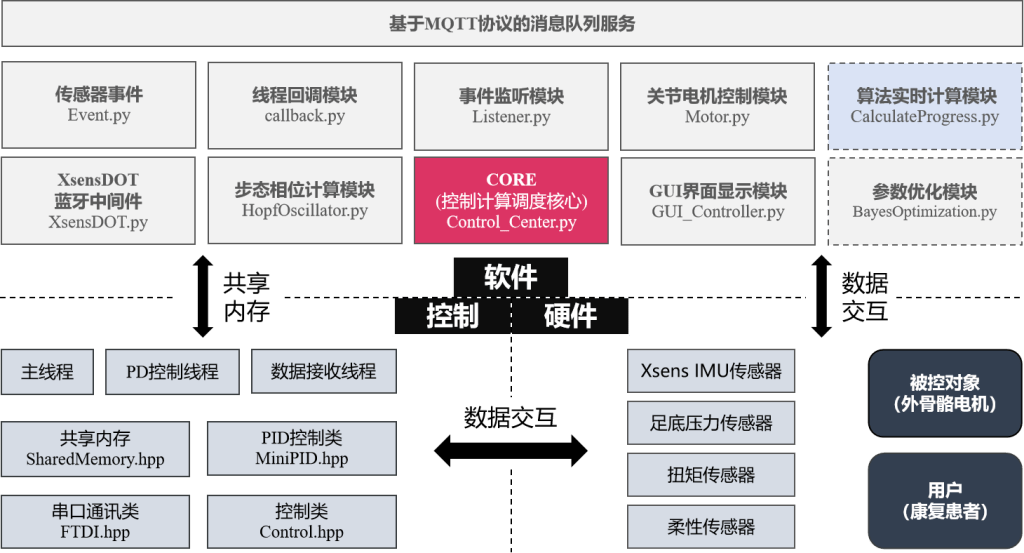
- 数据同步: 多传感器消息分发处理基于MQTT协议,计算数据基于共享内存交换
- 与主机数据传输方式/速率: RS232<->USB,200Hz
算法集成
- 基于共享自主的交互式步态轨迹学习/生成算法
- 算法开源项目地址:https://github.com/EricRongkai/ASRTG_SA