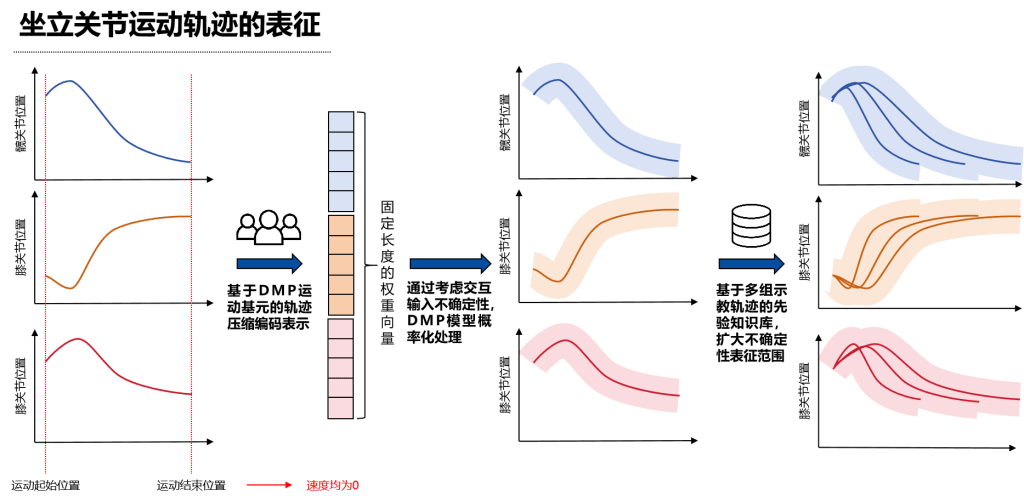
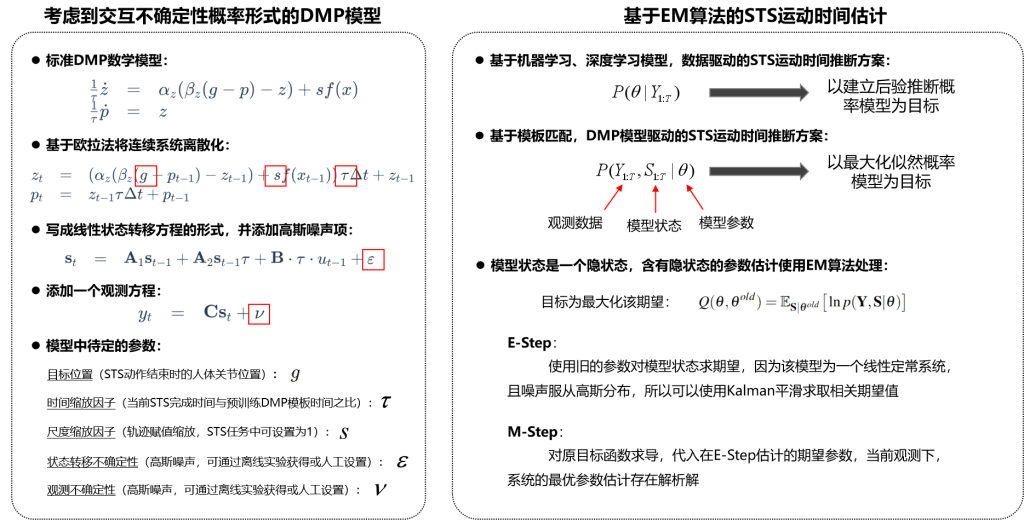
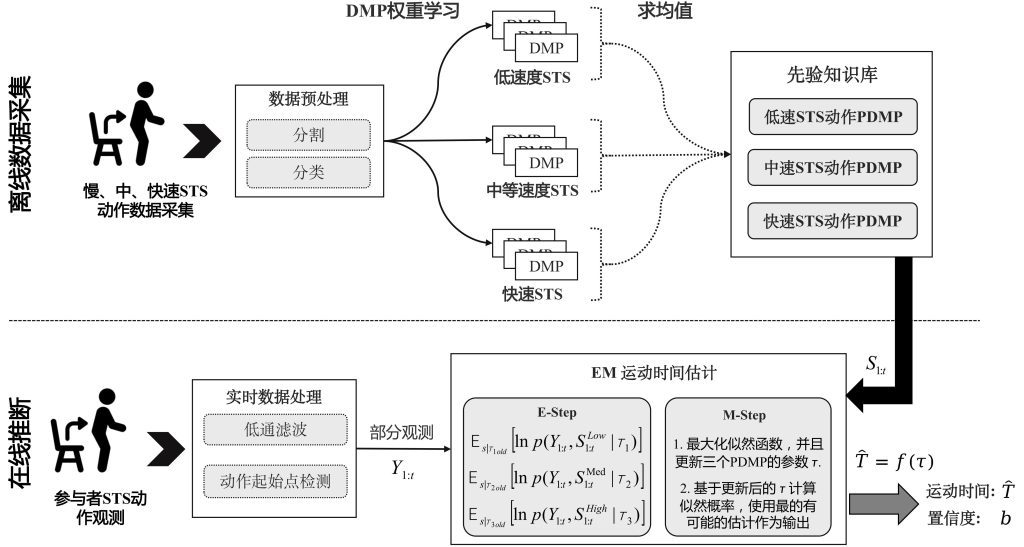
04-用于类人型辅助机器人的人体坐立运动意图预测算法 研究支持:腾讯Robotics X实验室 面向类人形机器人在康养领域的应用,基于概率化动态运动基元为自适应辅助轨迹优化开发人运动意图预测算法。针对坐立状态转移,基于OpenSim进行了骨骼肌肉动力学模拟仿真。 基于概率化DMP模型的运动先验信息表征 坐立运动轨迹随机模型 基于EM算法的连续运动意图估计 算法框架 基于OpenSim的骨骼肌肉模型仿真 运动意图预测实验