
项目支撑:国家重点研发计划云计算和大数据专项-基于大数据的自然交互意图理解和智能输入、安徽省重点研究与开发计划-面向机器人交互的柔性应变传感器研制与应用
研究支持:中国科学院合肥物质科学研究院、安徽省残疾人联合会、安徽医科大学第二附属医院、合肥市特殊教育中心、淮北天德残疾人体育康复竞训中心
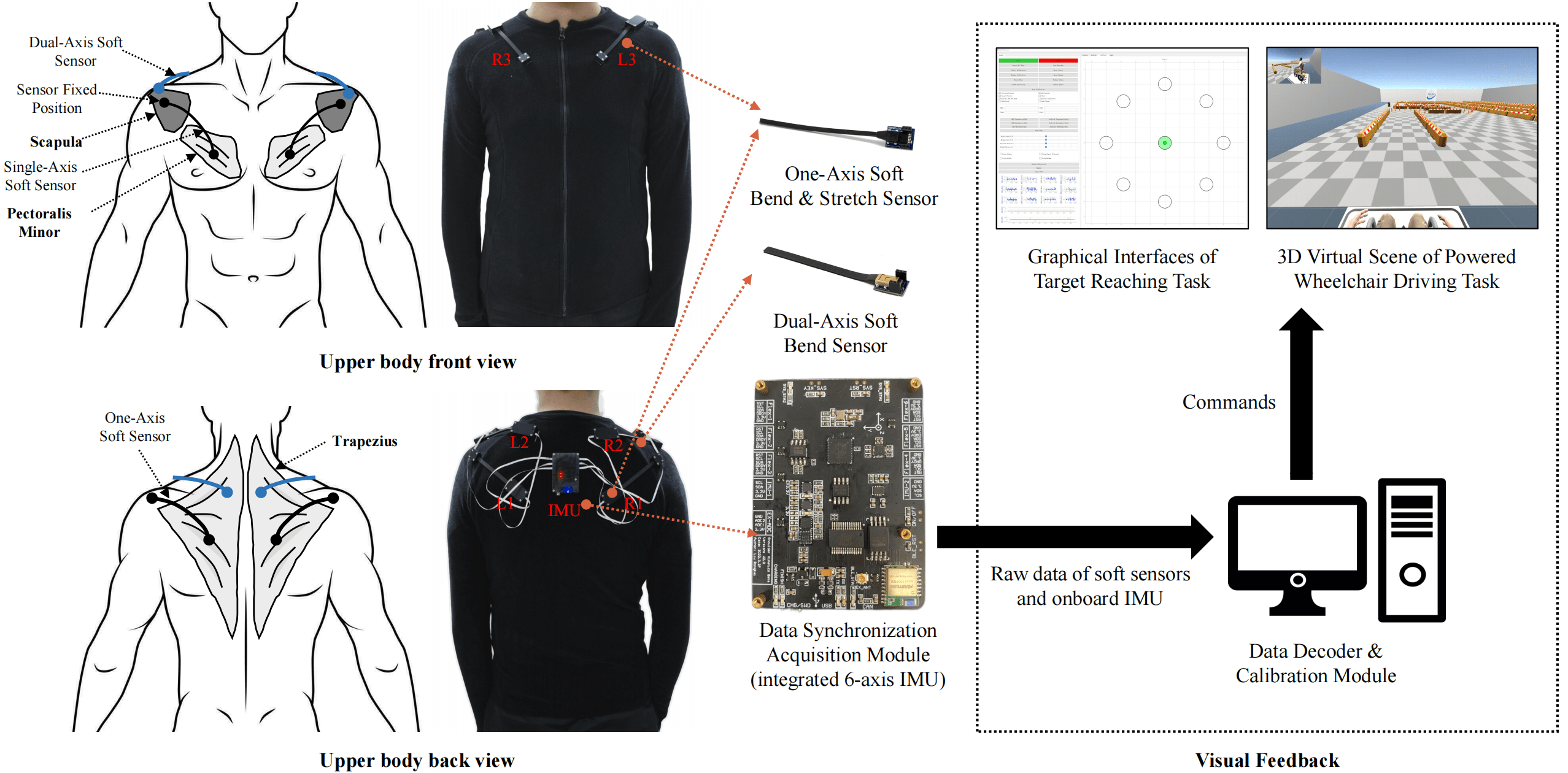
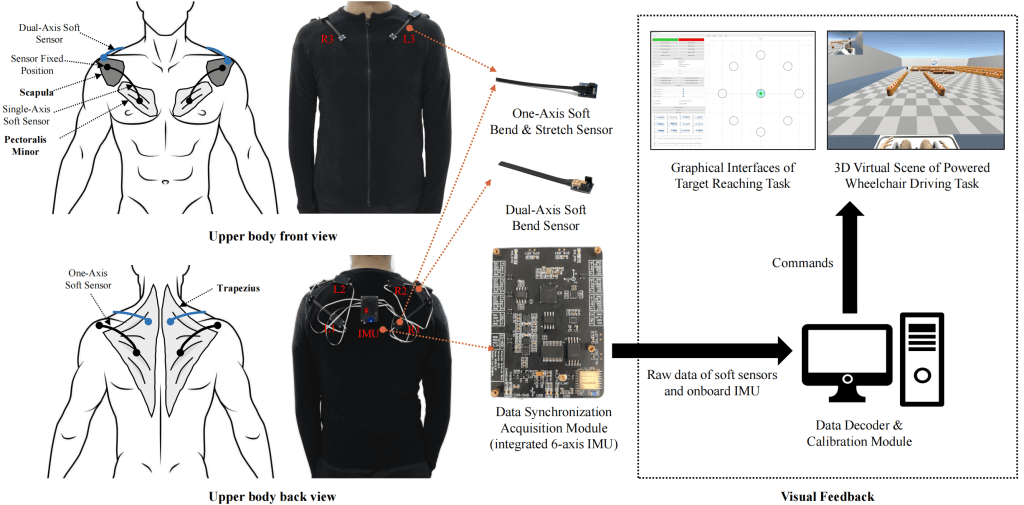
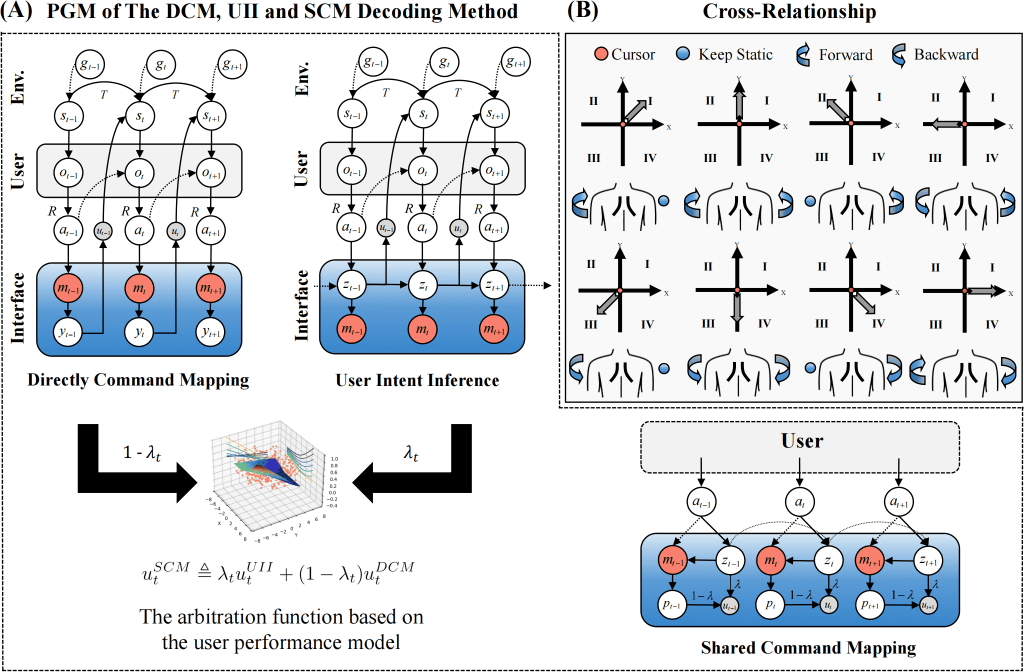
对于双侧上肢截肢患者和四肢瘫痪患者而言,高效的人机交互不仅能提高他们的生活自理能力,还可以减轻社会和家庭的护理负担。本研究了基于硅胶柔性弯曲/拉伸传感器网络以及一个惯性传感器,提出一种可穿戴式柔性体-机交互界面(SoftBoMI)。设计了两种数据解码模型,并通过将用户在使用直接数据映射模式时的操作表现先验知识结合到共享自主方法中,实现了两种数据解码方式的自适应切换。通过一系列光标操控实验和虚拟电动轮椅驾驶任务验证了所提出交互界面和数据解码方法的有效性。
SoftBoMI原型介绍
技术细节
- 重量: 430g
- 功耗: 270mW
- 软传感器类型: 硅胶介电材质电容传感器
- 一轴软传感器: 捕捉单方向的弯曲和伸展位移信息
- 双轴软传感器: 捕捉两个正交方向的弯曲信息
- 总数量: 四个一轴传感器和两个双轴传感器
- 定向捕获肌肉:胸小肌,斜方肌
设计特点
- 防滑设计:为减少与身体间的滑动影响,在动作捕捉服内放置了硅胶防滑绑带。
- 固定方式:使用3D打印的壳体将软传感器固定在衣服上。
- 解码方式:线性映射、最优状态估计、混合模式
数据传输
- 连接方式: 软传感器通过I2C总线和FPC软电缆连接到数据同步模块
- 数据上传方式与速率: 蓝牙或串口,50 Hz
应用验证
SoftBoMI在多名健康参与者以及三位四肢瘫痪参与者以及两位双上肢截肢参与者上进行了初步临床实验验证。




在该视频中给出了SoftBoMI使用方法的完整演示。