
Real-time Gait Phase Estimation Based on Multi-source Flexible Sensors Fusion
RobCE 23: Proceedings of the 2023 3rd International Conference on Robotics and Control Engineering, 2023
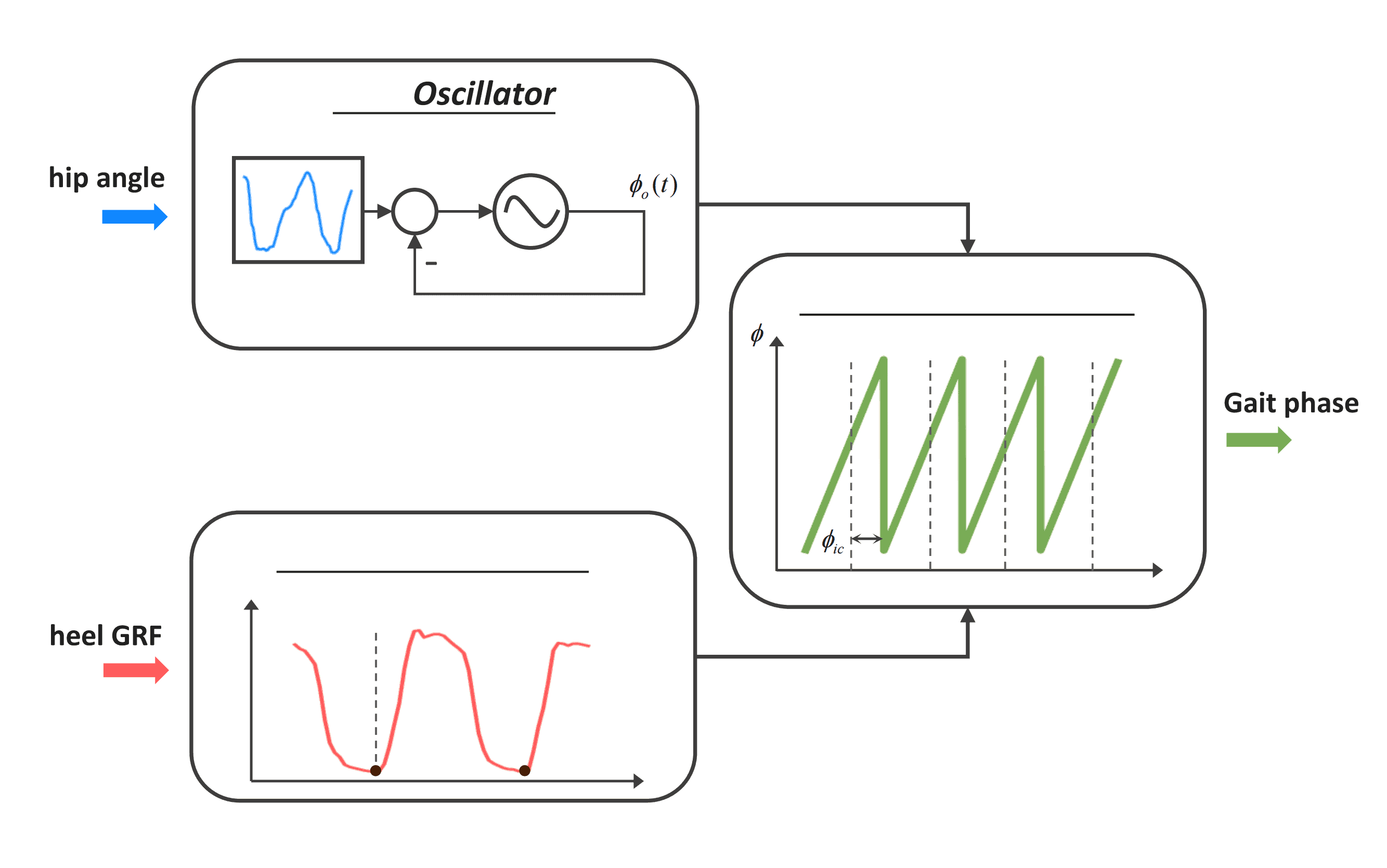
The real-time gait phase of human lower extremity is the foundation for wearable robots to provide precise and complex assistance strategies in human-robot interaction. In addition to strengths in estimation performance, it is crucial to make the devices portable and user-friendly that can drive the adoption in the unstructured environments. In this paper, we present an online continuous gait phase estimation system based on multi-source flexible sensors that address this issue. Specifically, we utilize two soft bend sensors mounted around the hip joint and a set of flexible pressure sensors mounted on the bottom of the foot to track the real-time motion of the lower limbs. The adaptive nonlinear frequency oscillators (ANFOs) are used to couple with the captured motion to generate a sequential, linearly growing gait phase. Moreover, heel strike events are detected to calculate phase shift and synchronize the phase with practical action. A uniform walking experiment validates the performance of the proposed method. The experiment results demonstrate that our approach could provide accurate gait phase information and has the potential to improve the interaction transparency of exoskeleton robots in the future.
Recommended Citation:
X. Zhao, R. Liu, T. Ma, H. Li, and Q. Song, “Real-time Gait Phase Estimation Based on Multi-source Flexible Sensors Fusion,” in Proceedings of the 2023 3rd International Conference on Robotics and Control Engineering, Nanjing China: ACM, May 2023, pp. 113–118. doi: 10.1145/3598151.3598223.