
_18-300x169.png)
02-SoftBoMI柔性体感交互系统
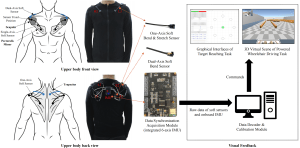
项目支撑:国家重点研发计划云计算和大数据专项-基于大数据的自然交互意图理解和智能输入、安徽省重点研究与开发计划-面向机器人交互的柔性应变传感器研制与应用研究支持:中国科学院合肥物质科学研究院、安徽省残疾人联合会、安徽医科大学第二附属医院、合肥市特殊教育中心、淮北天德残疾人体育康复竞训中心 对于双侧上肢截肢患者和四肢瘫痪患者而言,高效的人机交互不仅能提高他们的生活自理能力,还可以减轻社会和家庭的护理负担。本研究了基于硅胶柔性弯曲/拉伸传感器网络以及一个惯性传感器,提出一种可穿戴式柔性体-机交互界面(SoftBoMI)。设计了两种数据解码模型,并通过将用户在使用直接数据映射模式时的操作表现先验知识
03-偏瘫步态对称性康复辅助训练机器人
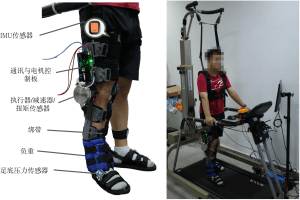
项目支撑:国家重点研发计划智能机器人专项-脑卒中康复机器人研究支持:中国科学院合肥物质科学研究院、东南大学、南京医科大学 对于脑卒中导致的偏瘫步态障碍,机器人步态训练因其有效性备受患者与临床医生认。本研究基于自主开发的一套主动式膝关节矫形器原型样机,提出了一种针对偏瘫患者的自适应对称步态轨迹生成框架。该框架采用自适应非线性频率振荡器和节律动态运动基元,实现了实时在线步态编码与自适应相位延迟。此外,结合步态技能库,我们设计了在线输入验证与仲裁功能的共享自主框架,以确保轨迹规划的安全性,避免健侧膝关节的不确定性运动带来风险。 主动式膝关节矫形器原型 技术细节 数据传输 算法集成 系统演示
04-用于类人型辅助机器人的人体坐立运动意图预测算法
研究支持:腾讯Robotics X实验室 面向类人形机器人在康养领域的应用,基于概率化动态运动基元为自适应辅助轨迹优化开发人运动意图预测算法。针对坐立状态转移,基于OpenSim进行了骨骼肌肉动力学模拟仿真。 基于概率化DMP模型的运动先验信息表征 基于EM算法的连续运动意图估计 基于OpenSim的骨骼肌肉模型仿真 运动意图预测实验

05-人体上肢、下肢可穿戴无线惯性运动捕捉系统
项目支撑:国家自然科学基金青年基金研究支持:中国科学院自动化研究所 基于惯性传感器的人体运动捕捉系统通常需要在每组活动肢体上放置传感器节点,这显著增加了运动捕捉设备的部署成本。在本研究中,我们认为像人体这样的多连杆复杂系统的运动是冗余的。因此,基于全套自主开发的人体惯性运动捕捉系统,我们探讨了使用稀疏节点进行三维运动重建的可能性。
06-基于惯性传感器的可穿戴帕金森病病情监测系统
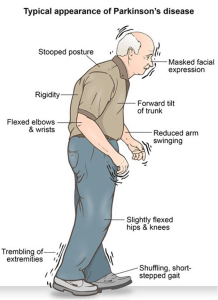
项目支撑:北京市自然科学基金研究支持:北京协和医院神经科、中国科学院自动化研究所 该项目的目标是开发一个可穿戴的帕金森运动症状监测系统,研究开发了两个可同步采集数据的手环和脚环,可实现多路惯性运动数据和sEMG信号的同步采集。该设备已在协和医院神经科完成了50例帕金森病人的运动数据采集。